What makes an effective research and development robot?
By Scott Simmie
At InDro Robotics, we sell a lot of robots and drones for the purpose of research and development.
Those devices range all the way from small and highly affordable out-of-the-box solutions like the LIMO PRO right through to highly complex builds for some of the largest technology companies in the world. And that image above? A recent build with a manipulator arm (and many other capabilities) for a client.
But what makes for an effective R&D robot? We put that question to Luke Corbeth, Head of R&D sales. Broadly speaking, he identifies four pillars of research when it comes to R&D. They are:
- Control
- Planning
- Perception
- Interaction
In fact, Corbeth recently pulled together a graphic explaining these pillars:
")
CROSSOVER AND CUSTOMIZATION
While the four pillars are all distinct, they’re not mutually exclusive. R&D might include both planning and perception, or any other combination of the above. And the focus of the R&D will obviously inform what sensors – even what locomotion – are ultimately required. Does the robot need autonomy, or will the client be coding their own autonomy stack? Is Simultaneous Localisation And Mapping (SLAM) required? Does the robot need to be able to navigate stairs? For our clients, these questions are all discussed in great detail during an initial discovery call with Corbeth.
Sometimes, particularly in lab-based work, an out-of-the-box solution may be all that’s necessary. At Boston University, for example, they have a fleet of LIMOs deployed in the lab for research on multi-agent systems (and other areas). R&D in the field, by contrast, generally calls for a larger and more robust type of robot.
“A project in the lab often means you can get away with a smaller platform,” says Corbeth. “And when people are trying to tackle problems in the real world they’re often using larger platforms.”
While this is generally true, there’s no question some indoor R&D can require incredibly sophisticated robots. One of our more complex builds, which we affectionately named Rosie, is a dual-manipulator robot designed for the Industry 4.0 setting. In fact, the entire lab itself is built for 4IR – with a suite of interconnected devices that share data not only within that location itself, but also with other R&D labs. (It’s actually a super interesting project, which we explored in detail here.)
Regardless, the planned R&D will inform what’s needed – including platform, sensors, etc. That’s where InDro has extensive expertise, not only in integration but in having tested and proven the components themselves. And that saves clients a lot of time and energy.
“If every client or research lab had to build a robot from scratch, it would take them a lot longer to get to the point where they need to be,” explains Corbeth. “And that’s largely why we come into the picture. We help jumpstart these projects and get them to their end goal much faster.”
Because InDro has years of experience building both custom robots for clients and our own products, we’ve learned – sometimes painfully – which components and platforms offer the best value and reliability. And, in conjunction with InDro Forge, we have the expertise for seamless integration,
“We’ve tested a wide range of different hardware and configurations,” he says. “We’ve basically swallowed that pill already so that our clients don’t have to.”
Plus, of course, if a customer already has some components they want to use, such as a pricey LiDAR, we can customise a package to exclude that and save the end-user money.
Below: Rosie, a dual-manipulator mobile robot we built for pick-and-place in a lab doing Industry 4.0 research

PLUS, OF COURSE, OPEN SOURCE
Everything we sell, when it comes to robots, is Open Source and nearly always with ROS 2 (Robot Operating System 2). This is a significant upgrade from ROS 1, which relied on a Master-Slave architecture. By making that architecture more distributed (eliminating that central ROS Master), ROS 2 reduces single points of failure and is more scalable. It’s also what those in the R&D space generally want, as Open Source allows them to easily pull in pre-existing code suitable to their research.
“The main thing with Open Source is not having to start at zero. If everything was Closed Source, you’d have to do everything from scratch,” says Corbeth. “That’s the value of Open Source; you’re building off of the discoveries of your peers, and that dramatically expedites progress for everyone who is Open-Sourcing their projects.”
And a final thing worth mentioning? Support. InDro has built a solid reputation for its after-sale support. From warranties and remote troubleshooting through to site visits (on the rare occasions that becomes necessary), we back what we build. We believe in minimising downtime for our clients so they can get on with R&D.
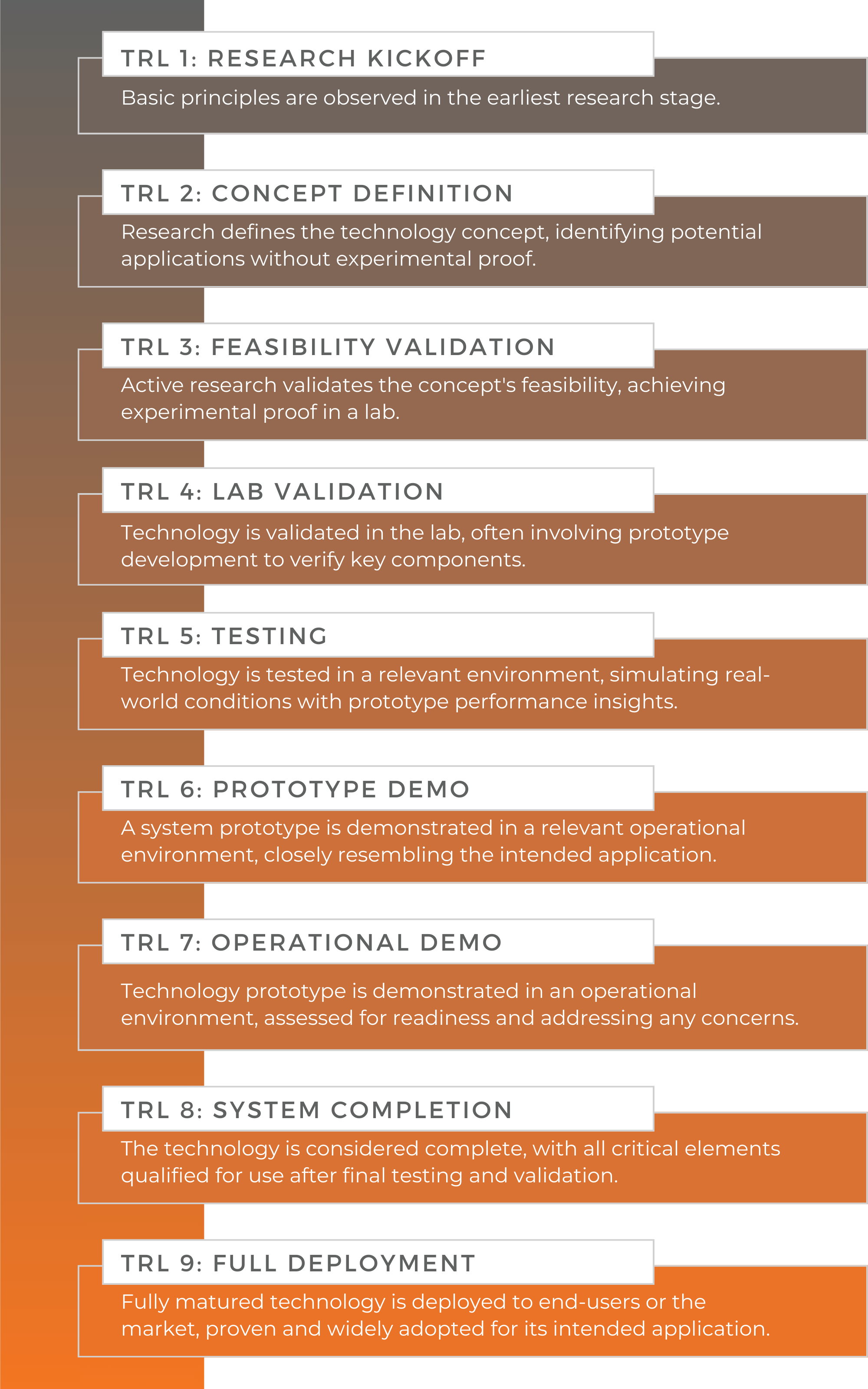
And remember those four R&D pillars? It’s a great top-level view. But Corbeth also took the time to drill down within those themes to take a far more detailed look at research areas and use-cases. It’s amazing the number of areas where research is taking place (and there are likely even more that could be added):

INDRO’S TAKE
We’re in kind of a unique position when it comes to helping clients requiring robots or drones for Research and Development – because we’re an R&D company ourselves. In addition to finding the best solution for customers (whether it’s out-of-the-box or a complex custom build), we are continuously developing our own products. Some of those products, like InDro Commander and the forthcoming InDro Cortex have been designed for those clients who want to build or modify their own robots with ease. We truly understand the R&D journey – and have something of a special affinity for clients in that space.
“From the very outset, InDro Robotics was formed as a Research and Development company, so we truly get it,” says Founder and CEO Philip Reece. “It’s in the interests of the entire robotics industry to see advances in the R&D space – so we’re always happy to assist with solutions from the simple to the complex. It really is what we do.”
Want to continue the conversation? Feel free to contact us here. He’s always happy to talk robotics with zero pressure.












_(cropped)")